Resumen
Método novedoso para estimar el patrón de fondo de sensores de imagen a cualquier temperatura de operación, basado en mediciones previas tomadas en laboratorio. Permite una corrección precisa de las imágenes en situaciones en las que la temperatura del sensor no puede controlarse y no se dispone de obturadores mecánicos para calibración in situ. Simplifica la operación de la cámara y permite optimizar su tamaño, peso y consumo.
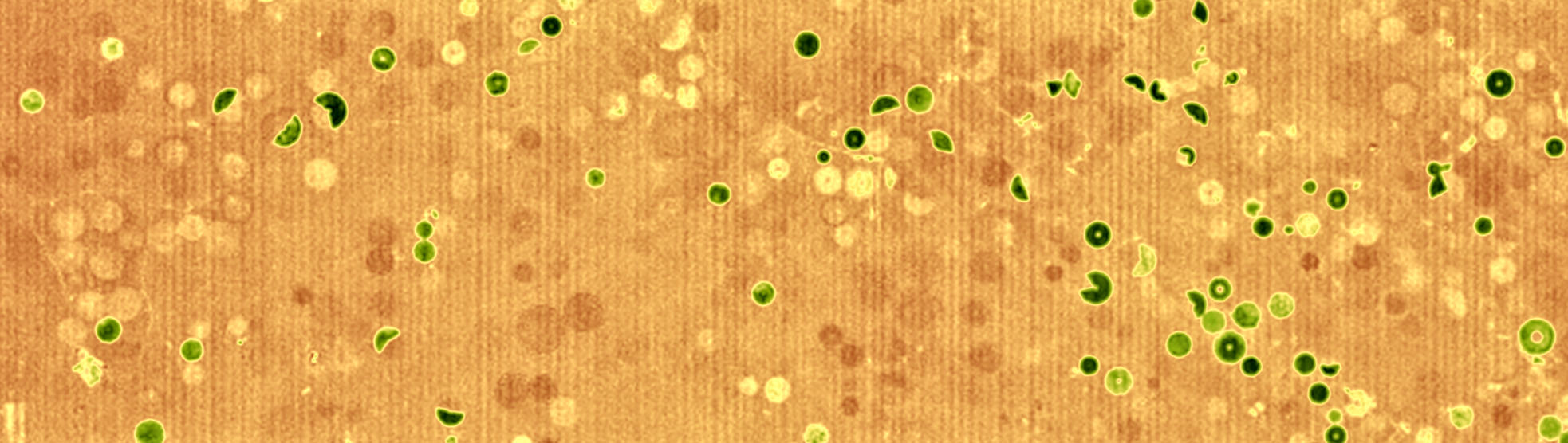
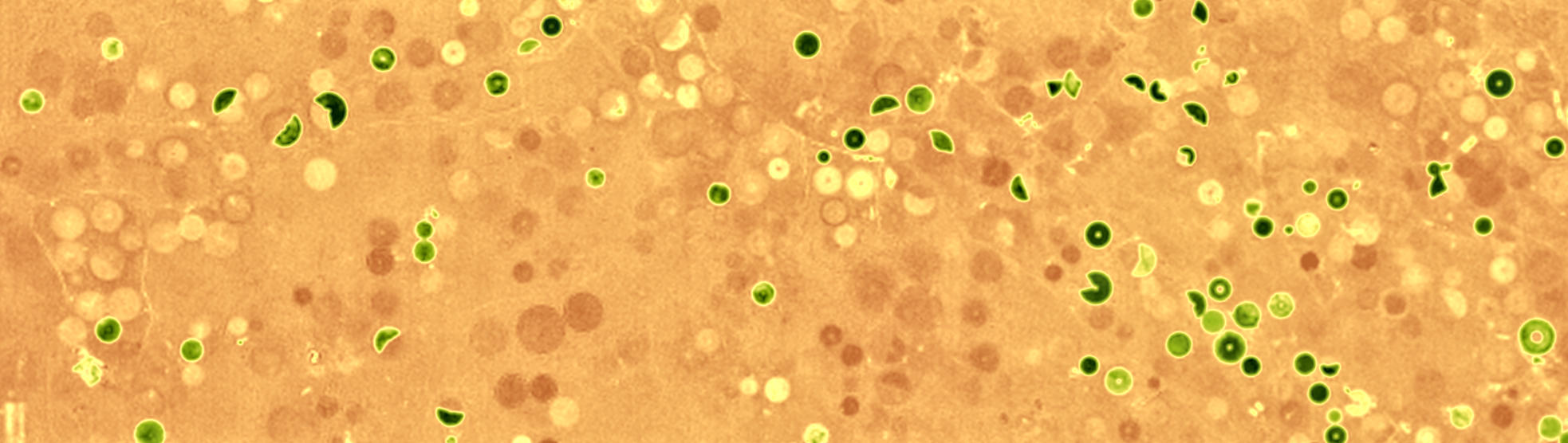
Ejemplo: Mapas de humedad de vegetación obtenidos por una cámara espacial InGaAs no refrigerada.
| Propiedad industrial | Patente concedida en EP, US y JP, solicitada en CN y AR |
|---|---|
| Estado de desarrollo | TRL 9Validado en tres misiones espaciales con cámaras SWIR no refrigeradas |
| Colaboración propuesta | Licencia o cesión |
| Contacto | Anselmo Sosa Méndez Unidad de Apoyo a la Investigación y Transferencia ait [at] iac.es (ait[at]iac[dot]es) |
Necesidad del mercado
Los sensores de imagen producen patrones de fondo que deben corregirse en cada imagen adquirida. Estos patrones dependen, entre otros parámetros, de la temperatura del sensor. Si no se corrigen adecuadamente, es posible que las imágenes no alcancen los niveles de calidad requeridos.
En algunas tecnologías de sensores como InGaAs, la dependencia con la temperatura es tan fuerte que los fabricantes de cámaras se han visto obligados a añadir sistemas de control de temperatura para intentar estabilizarla a algunos valores predeterminados. De esta manera, los patrones de fondo asociados se miden en fábrica o sobre el terreno, con la ayuda de obturadores mecánicos.
Hay aplicaciones en las que controlar la temperatura no es una solución viable debido a la cantidad limitada de potencia, masa y volumen disponibles para dedicar al sistema de control de temperatura, especialmente cuando la temperatura ambiente puede cambiar rápidamente.
Solución propuesta
Proponemos un nuevo método que permite obtener imágenes de alta calidad mediante la corrección de los patrones de fondo de los sensores de imagen a cualquier temperatura de operación. Esto elimina la necesidad de incluir sistemas de estabilización de temperatura en cámaras donde dichos sistemas eran obligatorios.
Las cámaras que integren este método pueden beneficiarse de una reducción significativa en los presupuestos de potencia, masa y volumen, así como de una simplificación de los requisitos de operación. Esto abre la puerta a nuevas aplicaciones en los sectores aeroespacial, automotriz y de vigilancia medioambiental, entre otros.

Ventajas competitivas
Precisión | Rendimiento comparable al obtenido mediante caracterización in situ de la cámara. |
Sencillez | Puede ejecutarse fácilmente en un sistema embebido, como la propia cámara. |
Flexibilidad | Funciona con cualquier tipo de sensor, al no asumir ningún modelo de píxel concreto. |
Ejemplos adicionales
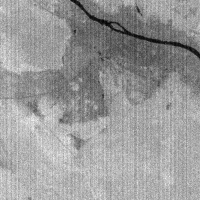
Las imágenes siguientes han sido tomadas por la cámara DRAGO-2 a bordo del satélite ALISIO-1, basada en tecnología InGaAs no refrigerada. Con el método propuesto, las imágenes pueden corregirse adecuadamente sin importar la configuración de adquisición ni la temperatura de operación, revelando características que de otro modo quedarían ocultas por el ruido del sensor.
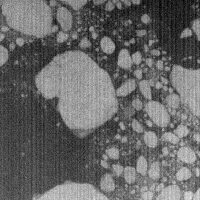
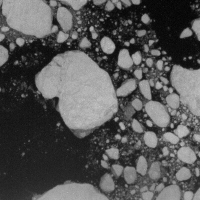
Costa de Groenlandia
El hielo glaciar y la nieve son difíciles de observar debido a su baja reflectividad en estas longitudes de onda.
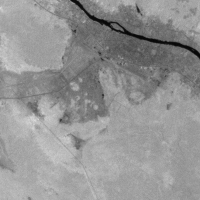
Río Éufrates
Se definió un tiempo de exposición que simulara la poca cantidad de luz que suelen recolectar los satélites de alta resolución.
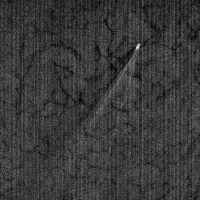

Mar Mediterráneo
Una corrección adecuada de las imágenes marítimas revela más detalles sobre la textura del agua y las estelas de los barcos.